
The multi-layered art of navigation
Route monitoring and collision avoidance can be assisted by ECDIS and radar, either operating as standalone workstations or as components of a wider Integrated Navigation System (INS). Antonio DiLieto, a senior instructor at CSMART, explains how to choose the right combination for the situation at hand
So-called radar and chart ‘overlays’ are a key capability of an INS. The purpose of the INS is to enhance safe navigation by integrating the different functions needed to avoid geographic, traffic and environmental hazards. By combining and integrating radar and ECDIS functionalities, an INS helps the navigator not only in terms of route monitoring and collision avoidance, but also by enabling them to monitor the integrity of the navigation sensors onboard.
Let us explore how using different layers on the INS can add value in three different scenarios:
1. Route monitoring on ECDIS with radar video layer
ECDIS route monitoring can be enhanced by adding a radar video layer as an ‘underlay’. This allows the navigator to compare – at any point in time – the actual exposed part of a dry area, or an isolated danger which uncovers at low water, with their positions as shown on the Electronic Navigational Chart (ENC).
On ECDIS, the ENC will always be displayed with priority over the radar layer, so doing this will not affect the full ECDIS monitoring capability. The radar layer will also not obscure ENC features like coastline, awash rocks, or dry areas at low water.
Having the radar target echoes as an underlay to the ENC may also enhance the ECDIS route monitoring capability. This allows the navigator to consider actual traffic if planning a deviation from the planned track.
By combining and integrating radar and ECDIS functionalities, an INS helps the navigator not only in terms of route monitoring and collision avoidance, but also by enabling them to monitor the integrity of the navigation sensors
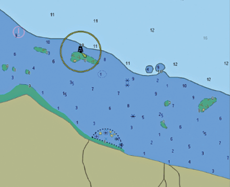
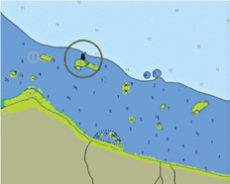
Top image shows ECDIS alone; bottom image shows chart with radar underlay
2. Collision avoidance on radar display with ENC layer and planned track
The use of radar for collision avoidance can be enhanced by setting an ENC layer with the planned track as an underlay on the radar. This can boost the navigator’s ability to evaluate options and make decisions based on the sea room available. Be careful; the radar video may obscure ENC features such as the charted coastline or an awash rock symbol.
To avoid excessive clutter on the radar display, you should carefully consider the amount of ENC information to be included in the underlay. In doing so, the navigator is not constrained by a minimum required display of ENC features. This is different from ECDIS route monitoring, which requires standard display as a minimum.
3. Sensor integrity monitoring on radar display with ENC layer and planned track
Monitoring the integrity of other sensors is a key functionality of an INS. For example, using ENC data as an underlay to radar displays can help detect any bias or failure from position and heading sensors.
A mismatch between the radar video (coastline, targets, navaids) and the corresponding ENC features indicates that there is a GNSS position bias. The planned track will also be affected by the same shift. If this happens, the navigator should rely solely on the radar video. They should deactivate the ENC layer and the planned route, which might be misleading. Instead, they will have to rely on parallel indexes (PIs) on the radar display and plotting positions manually on ECDIS using radar distances and compass bearings.
If there is a GNSS failure, the INS might automatically switch to Estimated Position mode. In such a mode the mismatch between the radar video and the ENC layer may not be immediately visible, but it may grow over time, depending on the accuracy of speed and heading inputs.
A gyro bias on the radar display will also generate a mismatch between the radar video, the ENC layer and the planned track, but of a radial nature. The radar video will rotate, producing a mismatch that increases with the distance from own ship. A reasonable response to avoid potentially misleading information is to deactivate the ENC layer and the planned track, navigate with the radar head-up and rely on radar distances, as well as on GNSS positioning, speed and course over ground available on the ECDIS. Essentially, you are acting as if the gyro had failed. In fact, a gyro failure would put the radar automatically in head-up display and deactivate the ENC layer, forcing the navigator to rely on GNSS positioning, speed and course over ground, all of which are still available on ECDIS.
Good practice
There is no single best way to use navigation layers on radar displays and ECDIS. Every situation will require dynamic adaptation to specific combinations of settings. However, there are some guiding principles to help you take advantage of navigation layers while operating an INS:
- Actively monitor both ECDIS and radar displays with the respective radar video and ENC layers.
- Customise the ENC layer on radar displays. Remember, information overload may compromise target detection and tracking for collision avoidance. Less is more!
- On a radar display, important ENC features may be covered by the radar video. This means you cannot use ENCs underlaid on radar displays to replace route monitoring on ECDIS.
- Actively monitoring the mismatch between radar video and ENC layers will help detect sensor bias and failures in good time
- Be ready to react to sensor failure by deactivating ENC layers on radar displays and by seamlessly transitioning to PIs and manual position fixing on ECDIS.